

.jpg)

.jpg)



Bądź n@ bieżąco
Dostawca pneumatyki i automatyki z najszerszą ofertą w Polsce. Ponad 700 000 produktów dla każdej gałęzi przemysłu.
Siłowniki
.webp)
Grupa Siłowniki zawiera szeroki zakres elementów pneumatycznych, elektrycznych i hydraulicznych stosowanych w układach napędowych maszyn i urządzeń oraz w procesach technologicznych i produkcyjnych. Siłowniki wykorzystywane są w ukłądach automatycznego sterowania. Szczególną grupę stanowią siłowniki pneumatyczne znormalizowane produkowane przez AIR-COM zgodnie z międzynarodowymi normami ISO 15552, ISO 6432 (minisiłowniki), ISO 21287 (siłowniki kompaktowe) oraz elementy mocujące do siłowników znormalizowanych.

































Siłowniki to elementy wykonawcze zamieniające energię medium roboczego (sprężonego powietrza, oleju hydraulicznego, energię elektryczną) na energię mechaniczną. Siła działania siłownika pneumatycznego i hydraulicznego zależy:
Siłowniki dzielą się na:
Ze względu na wykonanie siłowniki o ruchu liniowym występują jako:
Podział siłowników ze względu na rodzaj działania:
Do sterowania siłownikami pneumatycznymi i hydraulicznymi stosowane są zawory rozdzielające (rozdzielacze o funkcjach np. 3/2 NO/NZ, 5/2, 4/2, 5/3)
Do regulacji prędkości ruchu siłowników pneumatycznych i hydraulicznych używa się zaworów dławiąco-zwrotnych lub dławiących.
Rodzaje dostępnych siłowników pneumatycznych:
Do regulacji prędkości ruchu tłoczyska siłownika stosuje się zawory dławiąco-zwrotne. Regulacja następuje na całej długości skoku i aby była jak najbardziej skuteczna należy:
Warunki pracy w których występuje silne zapylenie (przemysł drzewny i meblarski, produkcja sypkich materiałów budowlanych, produkcja pasz, przemysł młynarski i spożywczy) negatywnie wpływają zarówno na tłoczysko siłownika jak i na elementy wewnętrzne. Siłowniki pneumatyczne do pracy w pyle powinny być wyposażone w osłony tłoczysk lub w dodatkowy zgarniacz mosiężny usuwający przyklejający się do tłoczyska pył.
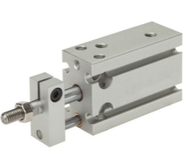
Konstrukcja siłowników kompaktowych jest zoptymalizowana pod kątem minimalizacji ich długości pod zabudowę, co skutkuje krótkimi tulejami prowadzącymi tłoczysko oraz wąskim pierścieniem prowadzącym tłok. Siłowniki kompaktowe nie są przewidziane do długich skoków (optymalna długość to maksymalnie ok. 400 mm), co nie oznacza, że dłuższych siłowników nie wykonujemy. Zawsze jednak należy zapewnić w takim przypadku dodatkowe prowadzenie zewnętrzne (co konsultujemy z zamawiającym).
Problem ten jest typowy dla siłowników pneumatycznych i wynika ze ściśliwości powietrza. Nie jest on do wyeliminowania w 100% ale przy zachowaniu następujących zasad można w znacznym stopniu poprawić działanie takich układów:
nie zaleca się używania zaworów dławiąco-zwrotnych na siłownikach, ewentualnie regulację prędkości realizować za pomocą tzw. tłumików z dławieniem zamontowanych w zaworze rozdzielającym.
Siłowniki pneumatyczne mogą być stosowane w sytuacjach kiedy wymagana jest praca przy zasilaniu olejem hydraulicznym. Typowe uszczelnienia stosowane w siłownikach pneumatycznych (poliuretan PU, guma NBR oraz Viton-FKM) są odporne na działania oleju hydraulicznego. Należy jednak stosować siłowniki pneumatyczne w zakresie podawanego dla konkretnego typu ciśnienia pracy. Jedyną niedogodnością jest w takim przypadku brak skutecznego tłumienia w krańcowych położeniach (amortyzacja) i zalecany jest demontaż uszczelek amortyzacji lub całkowite “otwarcie” dławika służącego do regulacji amortyzacji.